首页
我的文章
设计导航
好物分享
标签
< 返回B站视频无水印解析工具
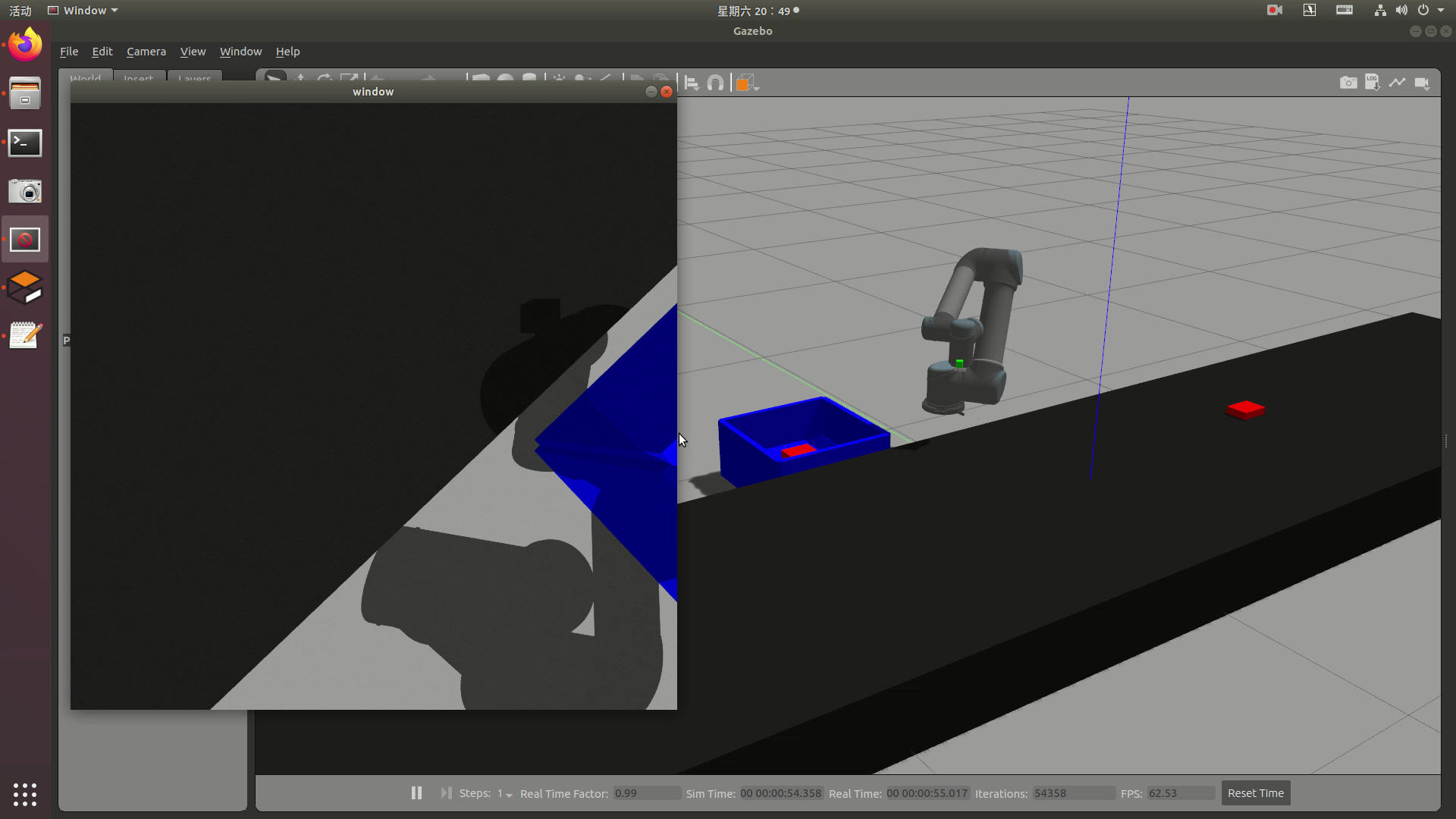
ros中ur5机械臂动态物体抓取demo
UR5机械臂装配vacuum末端,实现流水线上的目标识别与动态的抓取。
该项目在Github上开源,视频展示的是最终的仿真效果,具体项目内容最近会写。
https://github.com/Sunchanghao/ur5_gazebo_pickup
前往BILIBILI(B站)播放
来自:39.171.130.218
时间:2023-08-09 20:11:44
网址:https://www.bilibili.com/video/BV1W5411W7DE
ros中ur5机械臂动态物体抓取demo
web组第一次分享
全反射
坐姿与握姿VA0
ROS 经典项目 racecar gazebo 仿真演示
不想学习?教你1分钟快速进入学习状态!
8分钟教你Visio绘图
高分子材料——橡胶
《蜀道难。》 艺考稿件 第十八届齐越节获奖作品
被同学捧杀后成绩雪崩了,怎么办?
七彩云课堂-英语-外研版-6年级上册
2022务必避雷的5种学习方法
我方了...?开心得像个蛤蜊...?英语成语就离谱!#2
干货分享:分享一个提高200%学习效率的小技巧 I 如何记笔记?
统编版八下历史总复习
【知识分享】在美国最喜欢的食物之一
【高能干货】这个视频将会颠覆你对英语学习的认知——总述·阅读篇
《长难句的逻辑》方法论 Lesson3
一个视频说清整个英语语法体系(重塑你的语法认知框架)
祝老师语文课堂-一年级下册-绘本阅读