首页
我的文章
设计导航
好物分享
标签
< 返回B站视频无水印解析工具
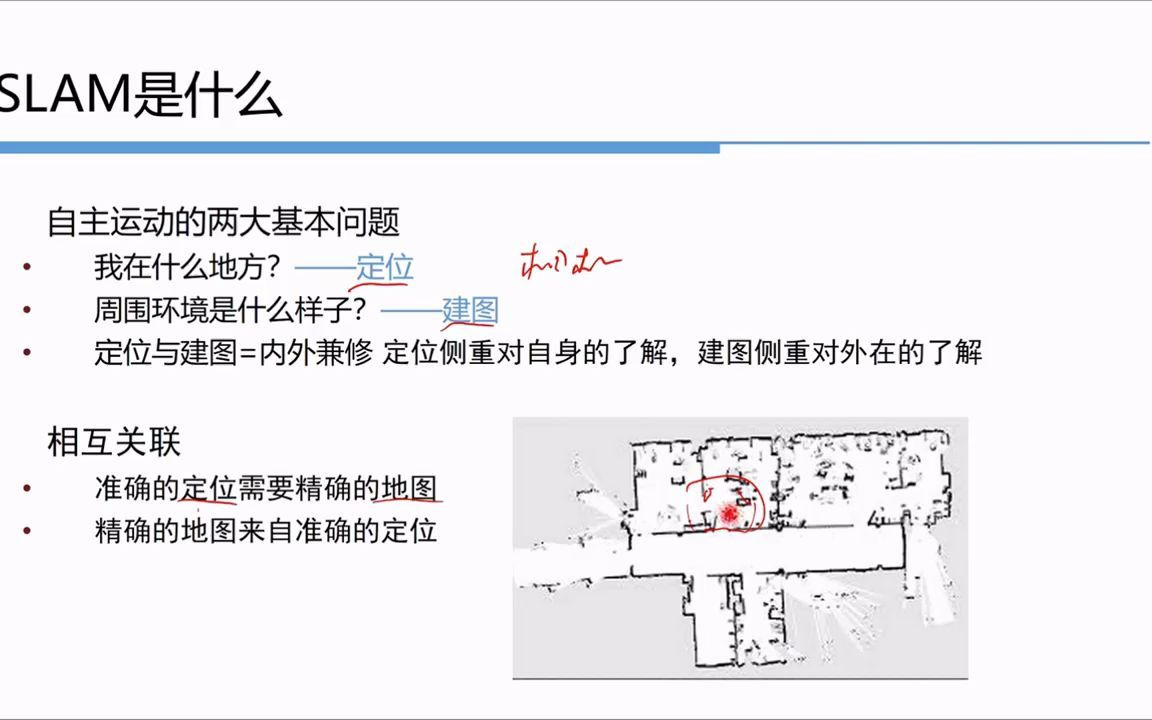
1-2 SLAM是什么
前往BILIBILI(B站)播放
来自:14.19.4.76
时间:2023-07-12 15:18:44
网址:https://www.bilibili.com/video/BV1KU4y1F7xU
1-2 SLAM是什么
2-1 点与坐标系
1-4 Linux下的C++基础
1-1课程内容与预备知识
1-3 视觉SLAM的数学描述
【SLAM】ORB SLAM2 实验室点云建图
ROS小车演示视频
面向移动机器人的道路环境感知
四足机器人 室内雷达视觉slam导航
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
计算机视觉之三维重建(深入浅出SfM与SLAM核心算法)—— 9.SLAM系统解析
计算机视觉之三维重建(深入浅出SfM与SLAM核心算法)——10.SLAM系统解析(下)
基于orbslam3的rgbd三维重建(ros版)
ROS机器人初级-例程运行
ORB-SLAM3基本原理与系统架构
计算机视觉之三维重建(深入浅出SfM与SLAM核心算法)——5. 双目立体视觉
大部分人没见过的slam建图
计算机视觉之三维重建(深入浅出SfM与SLAM核心算法)——11.总结篇
4.0_ROS2工具之launch文件与rosbag2_引言
4.4.5_launch与rosbag2_总结