首页
我的文章
设计导航
好物分享
标签
< 返回B站视频无水印解析工具
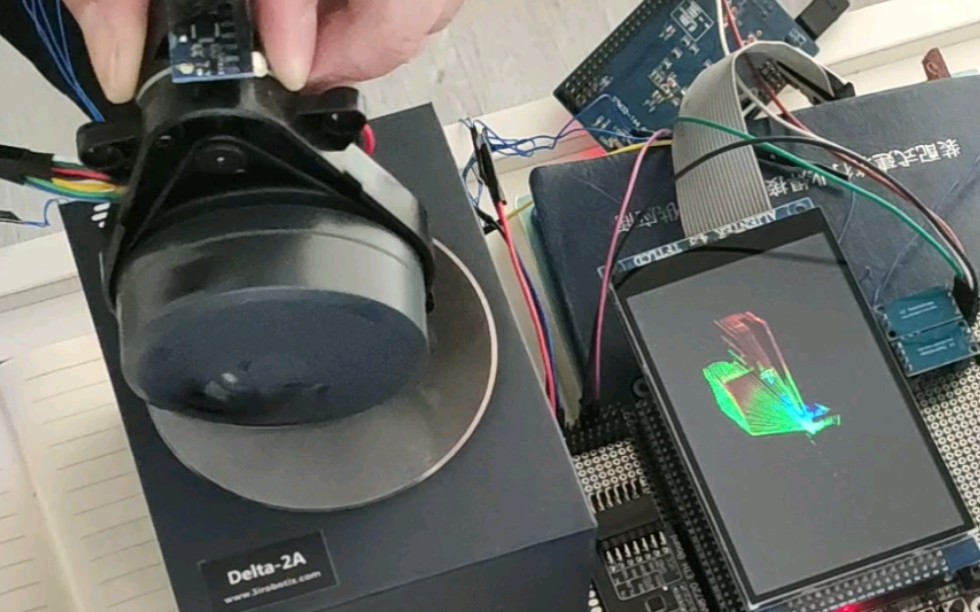
2D激光雷达结合imu扫描房间三维显示
根据imu提供的雷达姿态信息,将雷达扫描的二维激光点云数据通过姿态矩阵变换到世界坐标系,得到每个点的三维坐标,再通过投影变换,在屏幕上显示。
前往BILIBILI(B站)播放
来自:117.88.139.66
时间:2023-07-14 19:57:11
网址:https://www.bilibili.com/video/BV1Av411h7WN
2D激光雷达结合imu扫描房间三维显示
基于点云的3D车辆检测与跟踪(传统方法)
ROS机器人初级-例程运行
1分钟看明白,机器视觉组成!
15_VisionPro学习课程_几何工具练习1.mp4
激光雷达三维建模项目总结
基于机器视觉的象棋机器人
机器视觉(Halcon)
联为机器视觉halcon教程视频
要相信光:业界首款全向超广角4D激光雷达 1590元起
四足机器人 室内雷达视觉slam导航
机器视觉编程从入门到精通
【机器视觉】Halcon入门教程
83FPS,史上最快 | IA-SSD: 基于point方式的高效激光雷达点云3D目标检测网络(CVPR2022)
激光增材制造多尺度多物理场仿真
工业机器人视觉技术与应用
你的汽车是怎样看路的?硬核科普激光雷达(三)激光雷达的分类
移动跟随机器人 自动跟随机器人 激光雷达避障
基于LiDAR的道路边界检测
相机模型都没弄懂,怎么搞机器人视觉算法?