首页
我的文章
设计导航
好物分享
标签
< 返回B站视频无水印解析工具
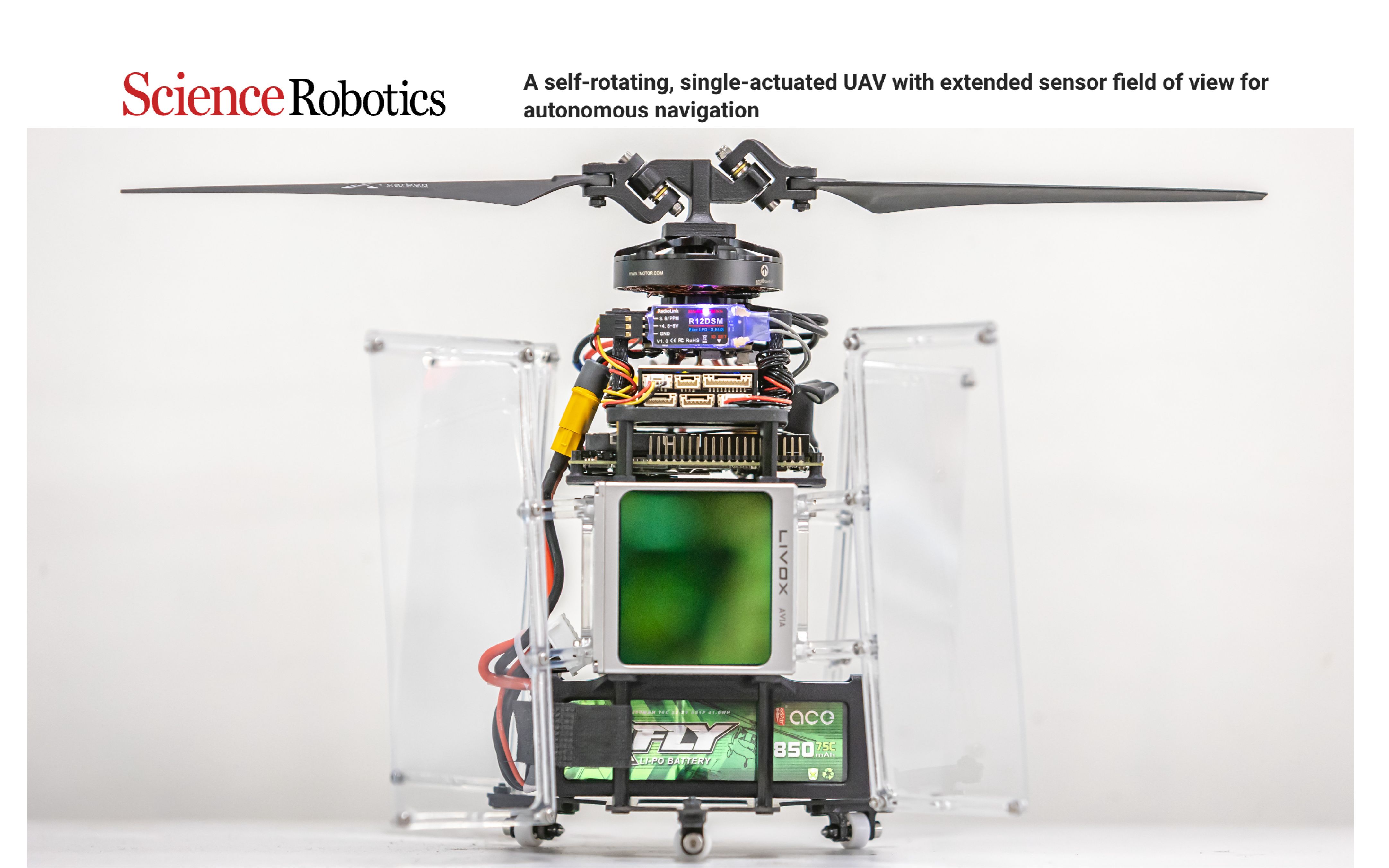
能自主导航的单执行器自旋无人机
PULSAR (powered-flying ultra-underactuated LiDAR sensing aerial robot)
无人机在很大程度上依靠视觉传感器来感知障碍物和探索环境。由于传感器视场较小,无人机在感知能力和任务效率方面都受到限制。一个解决方案是利用无人机的自旋运动来扩大传感器的视野,而不消耗额外的能量。这种能够由电机反扭矩引起的自然运动很少被现有的无人机所利用,因其高度耦合和非线性的动力学导致在设计和控制方面存在困难,以及高速自旋带来的导航挑战。在这里,我们提出了有动力飞行的超欠驱动雷达传感空中机器人“脉冲星(PULSAR)”,这是一种灵活的自旋无人机,其在三维空间的运动仅依靠单个执行器(电机)产生的推力和力矩来控制。单执行器设计有效地减少了动力飞行的能量损失,因此,PULSAR比具有相同桨叶面积和载荷的四旋翼无人机少消耗26.7%的能量,同时保持了良好的敏捷性。在机载雷达传感器的支持下,PULSAR可以在未知环境中执行自主导航,并在没有任何外部仪器的情况下检测环境中的静态和动态障碍物。我们利用PULSAR在环境探索和多方向动态避障方面进行了实验,结果显示通过自旋扩展FoV可以提高感知能力、任务效率和飞行安全的提高。
论文链接:https://www.science.org/doi/10.1126/scirobotics.ade4538
前往BILIBILI(B站)播放
来自:219.217.246.223
时间:2023-03-17 18:22:59
网址:https://www.bilibili.com/video/BV1Ro4y1i7mE
能自主导航的单执行器自旋无人机
激光雷达三维建模项目总结
详解激光雷达(完整版)
2023年5月9日-机载激光雷达竞赛外业培训
激光测距仪电路分析、工作原理,飞行时间法TOF(相位式激光测距仪 脉冲式激光测距仪),开源HT32激光测距仪软硬件,氮化镓的激光雷达的纳秒级激光驱动器,手持设备
“无人机蜂群”技术让无人机从各自为战走向集群作战
你的汽车是怎样看路的?硬核科普激光雷达(三)激光雷达的分类
小鹏P5 官方宣传片 - 全球首款量产激光雷达智能汽车
什么是激光雷达扫描仪?
比亚迪仰望U8最新信息,搭载无人机+激光雷达,你心动吗?
2023年4月27日—机载激光雷达竞赛培训回放
要相信光:业界首款全向超广角4D激光雷达 1590元起
机械式激光雷达原理介绍----(1)旋转反光镜型(宏观尺度)Mechanical LiDAR Principle----(1) Rotating Mirror
岭纬激光雷达轨道交通系列-列车运行安全解决方案
2D激光雷达结合imu扫描房间三维显示
微型无人机又被称为纳米无人机,凭借小巧体型能隐蔽执行各种任务
岭纬激光雷达矿山隧道异物检测客户实测案例
激光雷达又丑又没用?误会大了!
慢动作 动画介绍 激光雷达点云形成的原理Introduction to 3D LiDAR-Exwayz
绝对要看一次的!创意飞行器大赛!